吊车的无线电遥控虽已有成功的先例,但由于无线电装置易受工业用电的干扰,在编码和抗干扰性方面应作特殊考虑。为了避免杂乱电波的影响,使动作可靠,我们试制了用音频控制的吊车多路遥控设备。
工作原理
多路遥控是利用一根导线同时通过多个不同频率的信号,然后经滤波器分隔开来,分别去控制相应电路来实现的。本装置发送端方框图如图1。
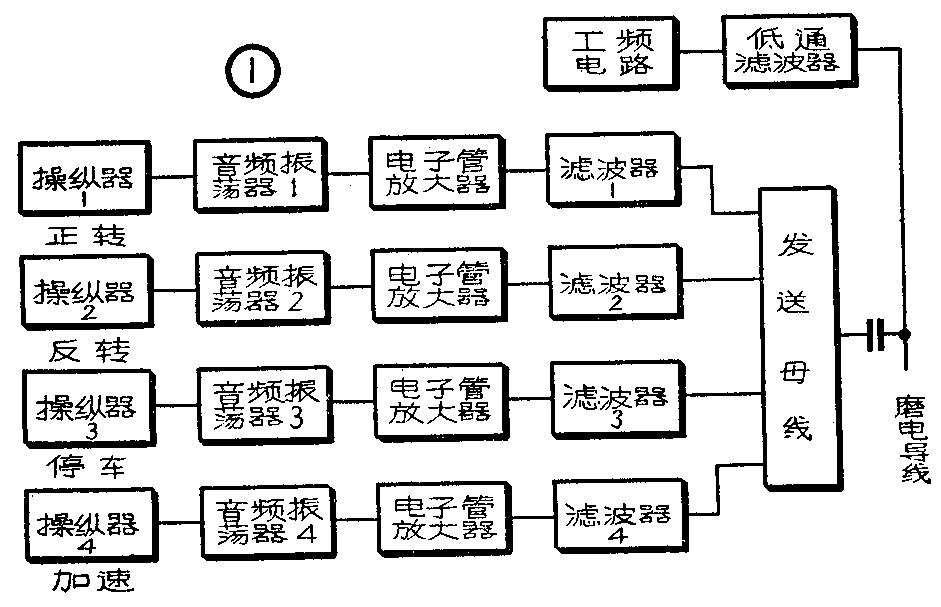
操纵器启动音频信号发生器发出频率固定的音频信号,该信号经过电子管放大器放大和只允许该信号通过的滤波器后,送至发送母线,发送母线可汇集多个音频信号,并将信号底至摩电导线(摩擦接触导线)。
为了实现对电机的正转、反转、加速和停车的控制,发送端共有四个操纵电路,根据需要向线路发出四种频率不同的音频信号。
吊车上一般有大车、小车和卷扬等三台电机,为此,每台吊车应配备三套装置,分别向三条摩电导线发送信号,控制相应的电机。
当电机需要得到多种速度时,我们可以增加几个不同频率的音频信号发送装置。为了安全起见,还可以在大车电机的装置上,增添急刹车控制,即另加一个信号来控制急刹车的电磁抱闸。
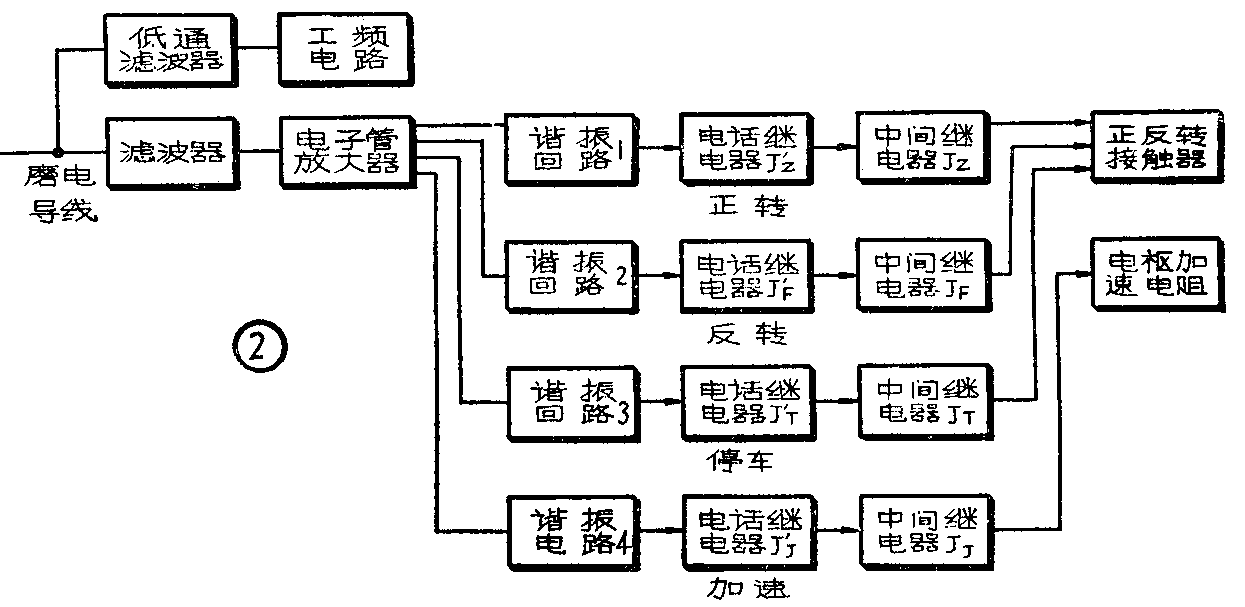
接收端方框图如图2。发送端发出的信号经摩电导线送至接收端,首先经滤波器除去工频电流,剩下的音频信号经电子管放大器放大后送至谐振回路。谐振回路由四条串联谐振回路并联而成,以接收四个不同频率的音频信号。所接收的音频信号整流后,驱动电话继电器,经中间继电器控制电机的正转、反转、加速和停车等。当然三台电机需要三套接收装置。
发送装置
每对应一台电机有四个发送装置。各发出一个固定频率的音频信号,以控制电机的一个动作。每个发送装置由操纵器,音频振荡器,电子管放大器和滤波器四部分组成,如图3所示。整个装置可以装在地面固定位置上,也可以单把操纵器装在一个盒子里,供操纵时移动。
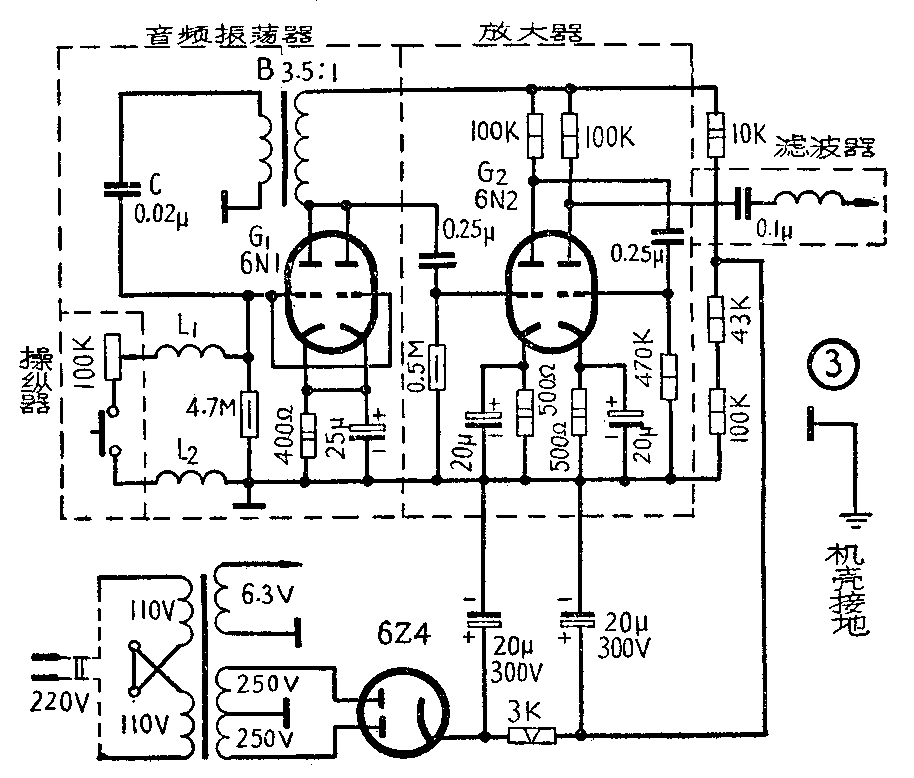
操纵器由电位计(一经调好不必再动)和按钮开关组成。四个操纵器分别接在四个音频振荡器的栅极电路里,控制振荡器的起振。
音频振荡器是一种弛张振荡器,由电子管G\(_{1}\),音频变压器B,栅极电容C,电感线圈L1和L\(_{2}\)以及栅极电阻等组成。当由两个电阻并联而成的栅极电阻取不同值时,即得到不同的音频信号。我们采用R.L.C振荡电路是因为可以在较宽的频带内交换频率,以利于谐振回路的选频和电动机动作的增多。
L\(_{1}\)和L2是用0.3毫米的漆包线合绕在直径11毫米圆筒上的线圈,每线圈绕60圈,两线圈间隔5厘米。
音频信号经G\(_{2}\)(6N2)两级电压放大后,输至滤波器。如果接收端认为信号太弱时,还可增加放大级数。
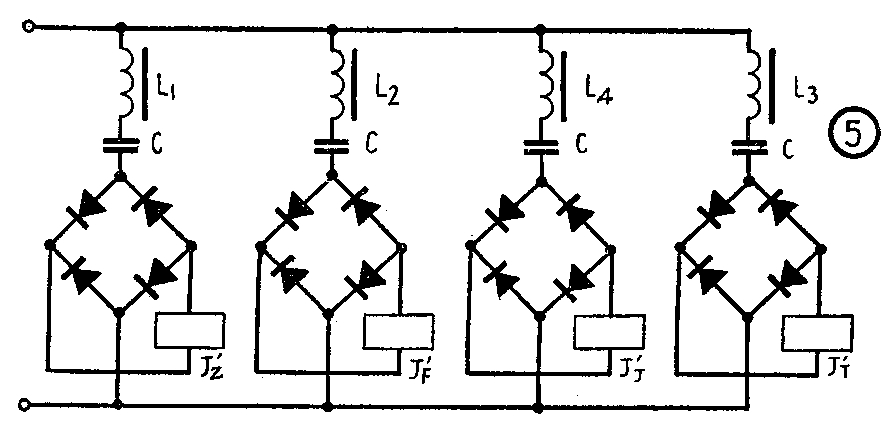
此处的滤波器为只允许一种频率即相应音频信号通过的滤波器。它的一个串联谐振电路,其结构与接收端之谐振回路的谐振支路相同(见图5)。
接收装置
每台电机的接收装置,由滤波器、电子管放大器、谐振回路、执行机构四部分组成。全部设备装在吊车上随车移动。
滤波器的作用是隔除工频电流而只允许音频信号通过。我们在试验时只用了一个小电容,但若能加装一滤波器,对消除干扰会更好一些。收发两端的低通滤波器构成让工频电流通过的通路,这样工频电流更不会串入控制设备了。
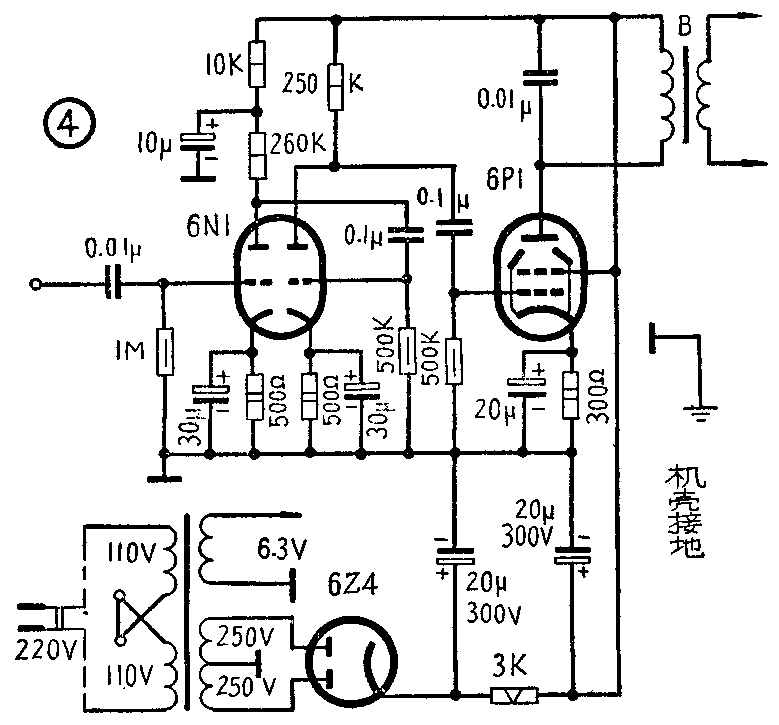
由于线路有损耗,而发送功率又有限,所以采用了二级电压放大,一级功率放大的放大器,如图4所示。这样就有足够的信号电流流入谐振回路驱动继电器。
谐振回路由四个谐振频率不同的串联LC电路并联而成,为了使各个不同频率的信号易于分离,频率间隔应尽量取得大一些,我们选用的频率是470赫、900赫、1400赫、2200赫等。谐振回路如图5所示。
谐振回路是选择操纵信号用的,它对工作系统的可靠性起着决定性作用。回路的谐振频率应该准确,品质因数不能太小,否则就不能很好地选择信号。
谐振回路的电感线圈用12×12毫米\(^{2}\)的铁心,0.12毫米的漆包线绕制。C=0.1μf
L\(_{1}\)(2200赫):700圈,L2(1400赫):1000圈,L\(_{3}\)(470赫):3000圈,L4(900赫):1500圈。
整流器是16×16,72伏/56伏桥式硒堆整流器。谐振支路里的继电器是扁形继电器(代号:SV4、530、0.45Ⅱ),每支路里一个共有四个(J\(_{Z}\)':正转,JF':反转,J\(_{J}\)':加速和JT',停车)分别用来控制执行机构的相应中间继电器。
执行机构(见图6)包括四个中间继电器(J\(_{Z}\),JF,J\(_{J}\)和JT)和两个接触器(ZC,FC)用来控制电机的动作。
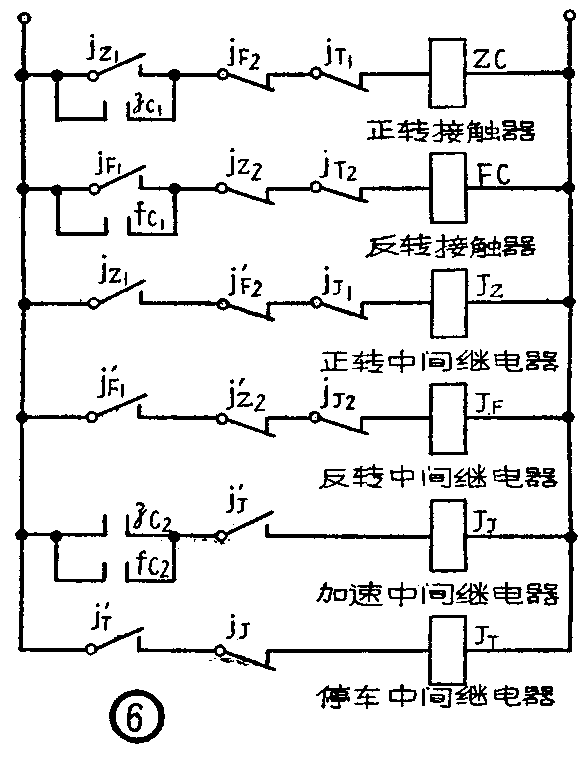
当发送端发出正转信号(2200赫)后,驱动接收端的正转继电器J\(_{Z}\)'。JZ'的接点J\(_{Z'1}\)接通正转中间继电器JZ的励磁电路,J\(_{Z}\)动作。JZ的接点j\(_{Z1}\)又接通正转接触器ZC的励磁电路,使ZC动作,去起动电机。因为ZC励磁电路里有自锁接点zc1,所以一经输入正转信号,在其它信号输入之前,ZC一直动作,保证电机继续运转。如果在输入正转信号时,电机正处于反转状态,从图6可以看出,J\(_{Z}\)'的常闭接点JZ'断开J\(_{F}\),JZ的常闭接点断开FC,使反转接触器FC复旧,停止反转。
当输入反转信号(1400赫)时,J\(_{F}\),FC动作,ZC复旧的情形与输入正转信号时的情形相类似,使电机反转。
在输入加速信号(900赫)的期间,使加速中间继电器J\(_{J}\)动作,去控制电机加速电阻。JJ的常闭接点j\(_{J1}\),jJ2,j\(_{J3}\)分别切断JZ,J\(_{F}\),J的电路,在电机加速运转期间,即使有它种信号输入,电路也不会动作。另外,电机在静止状态时,由于Z\(_{C2}\),fc2常开接点切断J\(_{J}\)的励磁电路,即使jJ'闭合,JJ也不会动作。也就是说,在电机静止时,即使输入加速信号,在执行机构里也不会有什么反应。
当输入停止信号(470赫)时,J\(_{T}\)动作,其接点jT1,J\(_{T2}\)切断ZC,FC电路,无论电机处于正转或反转,都能停车。
以上介绍的是多路单音频遥控装置,它具备一定的抗干扰性能,能够控制吊车运转。但为了抗干扰性更好一些,也可以采用多路多音频遥控,也就是说,每一个控制信号由两个以上的音频信号组成,这样它的抗干扰性就更好了,但电路要比单音频的复杂得多。(戴旦前)