雷达是什么
“雷达”这个名词,是从外文音译过来的,原意为无线电探测与测距,又名无线电定位。意思指的是利用无线电技术来测量物体的空间位置。
被雷达测量的物体,称为目标。它可以是空中飞行的飞机、炮弹;海洋中的船只或礁石;陆地上的高山、湖泊、建筑物或行进中的汽车、坦克。太空中的行星及航行的宇宙飞船位置,也可以用雷达来测量。
雷达是怎样测量目标的位置呢?让我们先举一个回声测距的例子来说明:当我们面向高山用双手在嘴旁合成一个圆筒形喇叭,大声地、短促地呼叫时(见图1),声音便从呼叫的地方出发,向着高山的方向传播出去;瞬间,声音又从高山那边反射回来,传播到我们耳朵里,于是我们听到了回声。倘使我们记录了声音从“出发”到“返回”所经过的时间,又知道声音传播的速度,那么人与高山的距离就可以很快地算出来了。
雷达测量目标距离的原理与回声测距是一样的。其区别在于雷达是利用无线电波,而不是利用声波,因此雷达必须有一套发射和接收无线电波的装置,并且还要有记录设备。
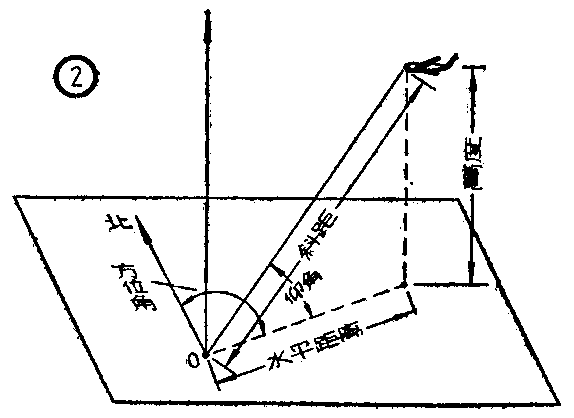
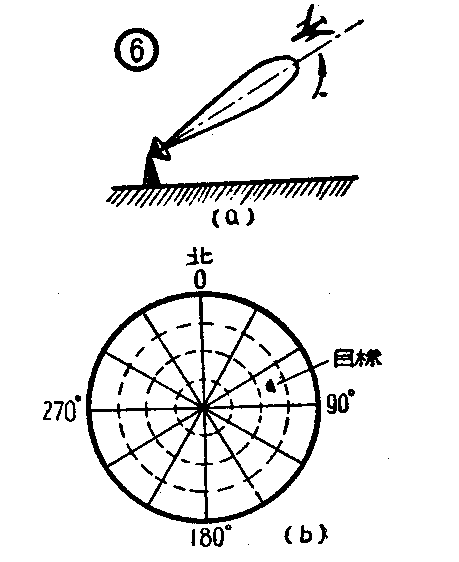
目标到雷达的距离称为倾斜距离,或简称斜距(见图2)。只知道斜距,还不能确定目标在空间的位置,一般情况下,还必须测出雷达所指的方位角及高低角。什么叫方位角和高低角呢?我们可以用指南针指出北方,从北算起,顺时针转,到达目标的方向所转过的角度叫做方位角(见图2)。正东的方位角为90°,正南的方位角为180°,其余类推。在水平计上,我们可以读出水平方向,目标方向和水平方向的夹角,叫做高低角。在水平方向以上称为仰角,在水平方向以下称为俯角。很明显,知道了斜距、方位角和高低角,目标的位置就完全确定了。有时还需要将目标所在的仰角和斜距折算成高度。有些雷达可以将斜距、方位角和仰角(或高度)同时测量出来,有些雷达只能同时测量其中的两个或一个数据。
雷达的组成部分
现代雷达是由大量的机械与电子电气元件组成的。它们是电子管、电容器、电阻、线圈、继电器、变压器、电动机、电表、开关、指示灯等等。一个复杂的雷达,元件的数量达几万个,或者更多。简单的雷达,元件数量也有好几千个。这些元件组成很多不同的部分,并构成一个严密的整体。下面我们举一个脉冲工作方式的雷达作为例子说明一下雷达的基本组成部分和它的工作过程,如图3所示。
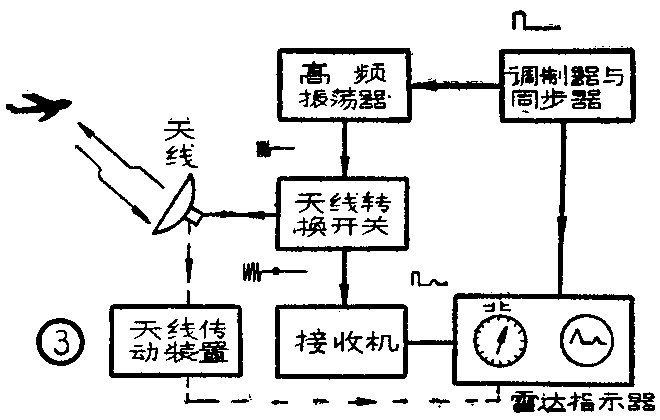
从图中可以看出,雷达的结构组成有天线、天线转换开关、高频振荡器、调制器与同步器、接收机、雷达指示器、天线传动装置等几个主要部分。
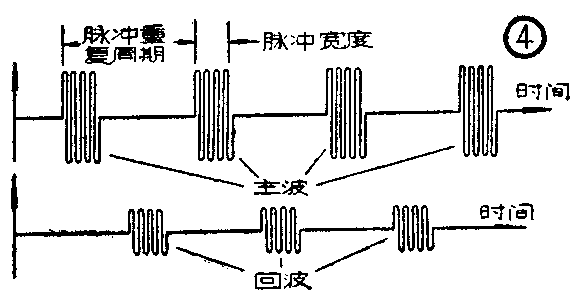
高频振荡器产生高频率的脉冲能量(波长一般从1厘米到10米),如图4所示。前一个脉冲与次一个脉冲相隔的时间,叫脉冲重复周期。每个脉冲持续的时间叫脉冲宽度。每秒钟发出的脉冲次数叫脉冲重复频率。高频脉冲经天线发出后,遇到目标反射回来,然后再发出第二个高频脉冲,如此继续下去。由于这种雷达振荡器的工作像人的脉搏一样跳动,所以叫做脉冲雷达。脉冲雷达发射的电波叫做主波,遇到目标反射回来的电波叫做回波。
天线用来将电波聚成一个很窄的波束,朝向目标发射出去,它的作用类似于探照灯的反光镜。雷达所以能测量目标的角度,就是因为天线使电波的发射具有方向性。天线发射电波和接收目标回波所指的方向,就是目标的方向。
天线转换开关的作用,是发射高频脉冲的瞬间,它将高频振荡器与天线接通,使能量从天线发射出去。在发射高频脉冲以后,又立即将天线接通至接收机,使回波能从天线进入接收机。
雷达接收机与一般的超外差式收音机原理相似。它具有高频放大器、本地振荡器、变频器、中频放大器、视频检波器及视频放大器等几个部分。雷达接收机具有较完善的增益控制和频率控制设备,用来较好地接收目标反射的回波。
雷达接收机输出的回波信号,送至雷达指示器中,从而使指示器显示出目标的距离。
天线传动装置用来驱动天线作水平或俯仰运动。天线运转时,无线电波束也随之在空间作扫描运动。天线传动装置将天线的位置数据同时送至雷达指示器,在指示器上,根据天线所指的方向,配合接收机输出的回波指示,即可读出目标所在的方位角和高低角数据。
调制器与同步器用来控制高频振荡器和雷达指示器的工作,脉冲重复频率和脉冲宽度是由它们控制产生的。
测量目标的距离
雷达发出的天线电波,在空中传播的速度是恒定的,这个速度近似等于30万公里/秒,常用C来表示。发出的脉冲能量如果经t秒钟以后反射回来,那么它所走的路程就为Ct。而雷达至目标的距离D只有Ct的一半,因此D=12Ct。
举一个例来说,如果测量一架飞机,当雷达发出电波后经过1毫秒(千分之一秒)后,接收到反射的回波信号,那么雷达至飞机的距离为
D=\(\frac{1}{2}\)×300,000公里/秒×0.001秒
=150公里。
如果脉冲重复频率为每秒400次,则每秒钟对这架飞机距离的测量可达400次。脉冲重复频率不能太高,否则发出的主波还没有回来,就接着发第二个脉冲,则当空中目标密集时,将分不清那个回波是相应的主波所产生的,因而会造成混淆。
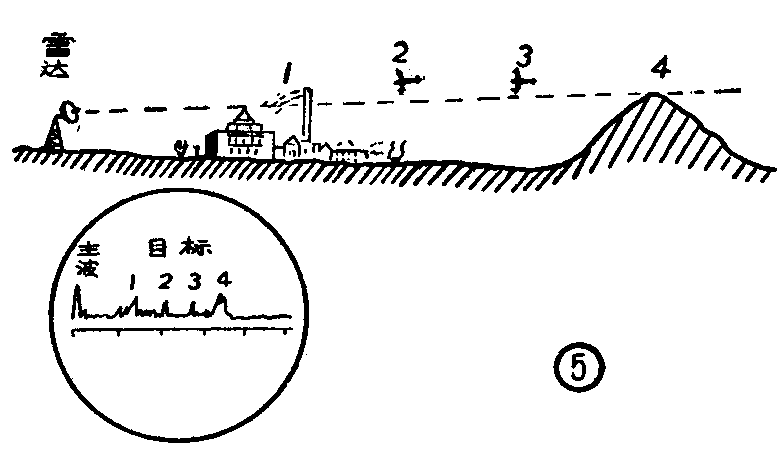
雷达测量距离的时间单位一般采用微秒(即百万分之一秒)。这样短的时间,用秒表来测量是办不到的,必须采用电子示波器作为雷达指示器。图5是雷达回波信号在电子示波器上所指示的图形。雷达主波在示波器的左边指示了出来,主波发出后,遇到的建筑物、飞机和山峰,产生了回波。根据回波回来的先后次序,一个一个地指示在示波器上。通过示波器上的距离刻度尺,读出主波与回波的相互位置,从而测出目标至雷达的距离。
测量目标的方位角
雷达测量目标方位角的方法,有三种基本形式,即(1)最大值法;(2)最小值法;(3)等强信号法。所有这些方法的原理,都是利用天线波束的方向性。
利用最大值法测量方位角时,天线传动装置驱动天线在方位角上旋转,使脉冲波沿着天线所指向的空间扫描,如图6a所示。当遇到目标后,回波信号即在雷达指示器相应的方位角刻度及距离刻度(虚线的同心圆)上指示出来。最大值法测量目标的方位角,实现较为简便,其缺点是精度稍差。
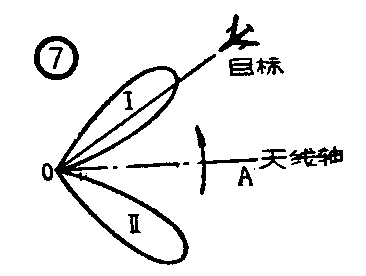
利用最小值法测量方位角时,雷达天线产生双波束,如图7中的Ⅰ、Ⅱ。天线转动时,如目标在两波束之间的天线轴0A上,则回波信号最小甚至消失,这时天线轴的位置即目标的位置。最小值法测量目标方位角精度较高,其缺点是实现较困难,测量也不方便。
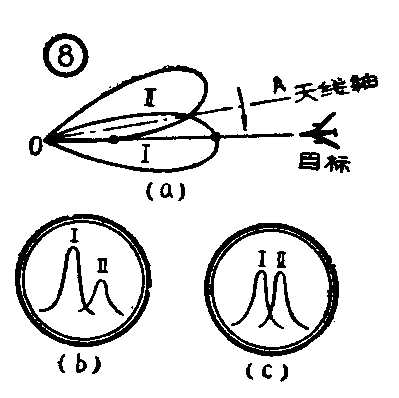
利用等强信号法测量目标的方位角时,是使雷达发出有一部分互相重叠的两个波束(见图8a中的Ⅰ和Ⅱ)。当目标在天线轴0A上时,两个波束所接收的回波信号在指示器上一样高(见图8C),此时天线轴的位置即目标的位置。等强信号法测量目标方位角较为简便,且精度较高。
除上述三种测量目标方位角的方法外,尚有一些形式,这里就不再详述了。
测量目标的高低角及高度
雷达测量目标高低角的原理,和测量方位角是相似的,只不过是实现的具体方法有所区别。
在许多情况下,光知道目标的高低角是不够完善的,如引导空军作战的引导雷达,它必须知道敌机的具体高度数值,以便引导我机进行阻击拦截。一般情况下,只需测出目标的斜距与高低角数据,再运用简单的三角公式进行计算,就可以求出目标的高度。不过,由于地球表面实际上是弯曲的,因此这样计算出来的高度数值,还需要加以修正,修正后的数值才是真正的目标飞行高度。(张里)