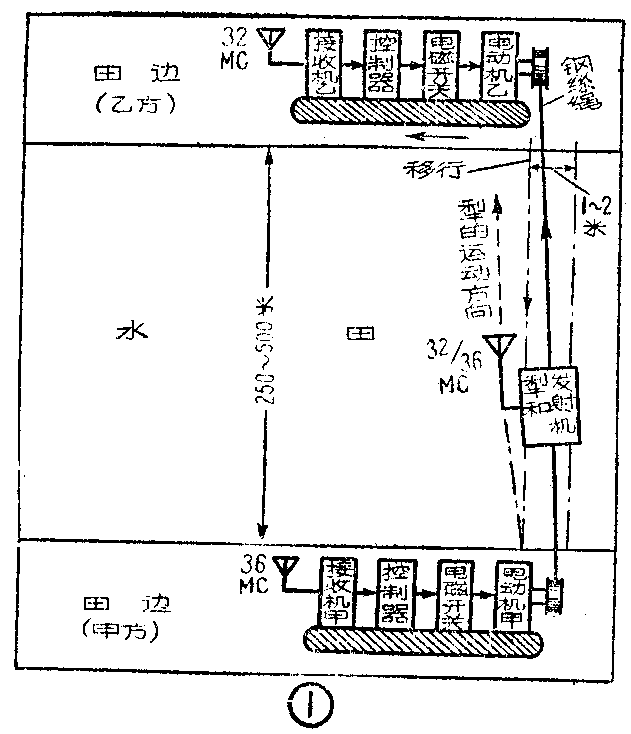
“电犁”是一种能用于水田的以电动机作为动力牵引的犁。具体设备是在水田的两边各设一台电动机,装在有履带的机座上。两台电动机之间连一条钢丝绳,拴住田里的犁。电动机转动时,牵引钢丝绳,拖动电犁向前运行耕地(参看图1)。两台电动机是输流工作的,并且都可以正转和反转。正转时牵引电犁;反转时则通过机架上的齿轮使履带转,带动电动机“移行”,即向前移动1~2米,到达下一个耕作位置。例如当乙机正转时甲机则休息,这时犁受乙机牵引向乙方田边前进。到达乙方后,乙机休息,甲机开动,先反转“移行”,再正转牵引电犁向甲方田边前进。这种犁是特制的,两面有刃,因此不需要转向,可以直接在前后相反的方向上连续耕地。
上述电动机的工作,全用人工管理时,两边电动机各需一人,扶犁一人,共需占用三个劳动力,而且三人之间要通过呼唤或打旗语等方式进行联系,很不方便。尤其是当犁陷在泥里或碰到石头等障碍物时,如不能及时停机,就容易造成事故。为解决这个问题,可装设一套无线电遥控设备,只需一人操作,不但节省人力,也比较安全,劳动效率也高。
下面介绍这种遥控设备的工作原理。
概述
这套设备包括一部发射机(由扶犁人随身携带)和两套接收机、控制器及电磁开关等(分别装在两田边上),如图1所示。
发射机选用不同频率的电波信号分别控制甲、乙两电动机,在同一频率上又用等幅波与调幅波分别控制电动机的正转和反转。例如用36兆赫的等幅波控制甲方电动机的正转,36兆赫的调幅波控制其反转;用32兆赫的等幅波控制乙方电动机的正转,32兆赫的调幅波控制其反转。这样只要由扶犁人扳动发射机的三个开关(电源开关,频率选择开关、等幅信号与调幅信号选择开关)便能控制电动机的动作(正转、停机、反转),从而使犁前进或使电动机移行。下面分别介绍发射机、接收机和控制电路。其中发射机和接收机部分,限于篇幅,只能介绍它们的工作情况和特点。
发射机部分
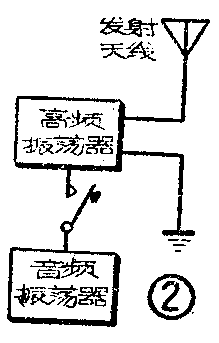
发射机包括超高频振荡器(产生32兆赫和36兆赫两种频率的振荡)和音频振荡器两部分。音频振荡器产生一个频率在400赫左右的音频信号,对超高频振荡器进行调幅,产生调幅波。当需要发送等幅高频信号时,只要拨动开关使音频振荡器停止工作就可以了(见图2)。
发射机可采用垂直式λ/4天线,因为工作在两个频率,不可能设计得很准确。但由于发送的距离不长(在一千米以内),对天线的要求也不严格。
由于发射机要随犁移动,所以采用能够充电的低压蓄电池,再经变压设备获得所需要的高压,这样比使用干电池远为经济,同时重量也不大,适于扶犁人携带。
接收机部分
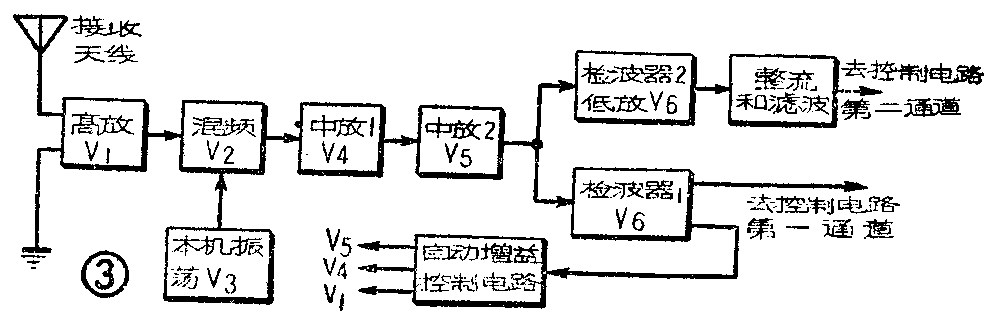
图3是接收机电路结构的方框图。为了减小发射机的重量,便于携带,应力求减小发射机的功率,而提高接收机的灵敏度。所以接收机采用超外差式电路,除有一级高放外还有两级中放。总增益接近300000倍,输出电压幅度要求在3伏左右,因此该机的灵敏度在10微伏左右。
此外接收机还有以下几个特点。
1.中频选得比较高(2.7兆赫);中频放大器的通频带也比较宽(64千赫)。中频偏高可以避免镜象频率的干扰。频带较宽可以降低对发射机频率稳定度的要求。假如频带太窄,发射机的频率稍有偏移,接收机就收不到控制信号了。当然频带也不宜太宽,否则会使噪音和干扰加大。
2.接收机的第五级由两个检波器和一个音频放大器组成(采用了一个双二极五极管)。
当等幅高频信号到达检波器时,只有极波器1输出负电压(检波器2没有电压输出),这个电压就是对控制电路第一通道发出的控制信号(指令)。
当调幅高频信号到达检波器时,除检波器1仍有负电压输出外,检波2也有一个音频调制电压输出,它首先经过音频放大器,然后再经过整流和滤波设备,也变成二个负电压,作为对控制电路第二通道发出的控制信号。
控制电路利用等幅波与调幅波作为两种不同的指令,不象一般控制设备采用不同的调幅波(不同的音频调制信号)作指令,大大简化了发射机的调幅设备和接收机的滤波通道,同时对发射机调制音频的稳定性要求也降低了。
3.由于发射机发送等幅信号时是随着电犁移动的,它与接收机之间的距离不断变化,因而接收机收到的信号强度也就随着变化,使检波器1输出的负电压不稳定,影响第一通道控制管(图4中V\(_{7}\))的工作。为了克服这个缺点,必须增加自动增益控制电路。图3中检波器1输出的负电压除作为控制电压以外,还作为自动增益控制电压加到电子管V5、V\(_{4}\)和V1的控制栅上去。
控制电路
对控制电路的要求是:收到控制信号以后能够正确地控制电动机的动作;能够有效地抑制干扰信号的影响。下面将比较详细地讨论控制电路的工作过程。
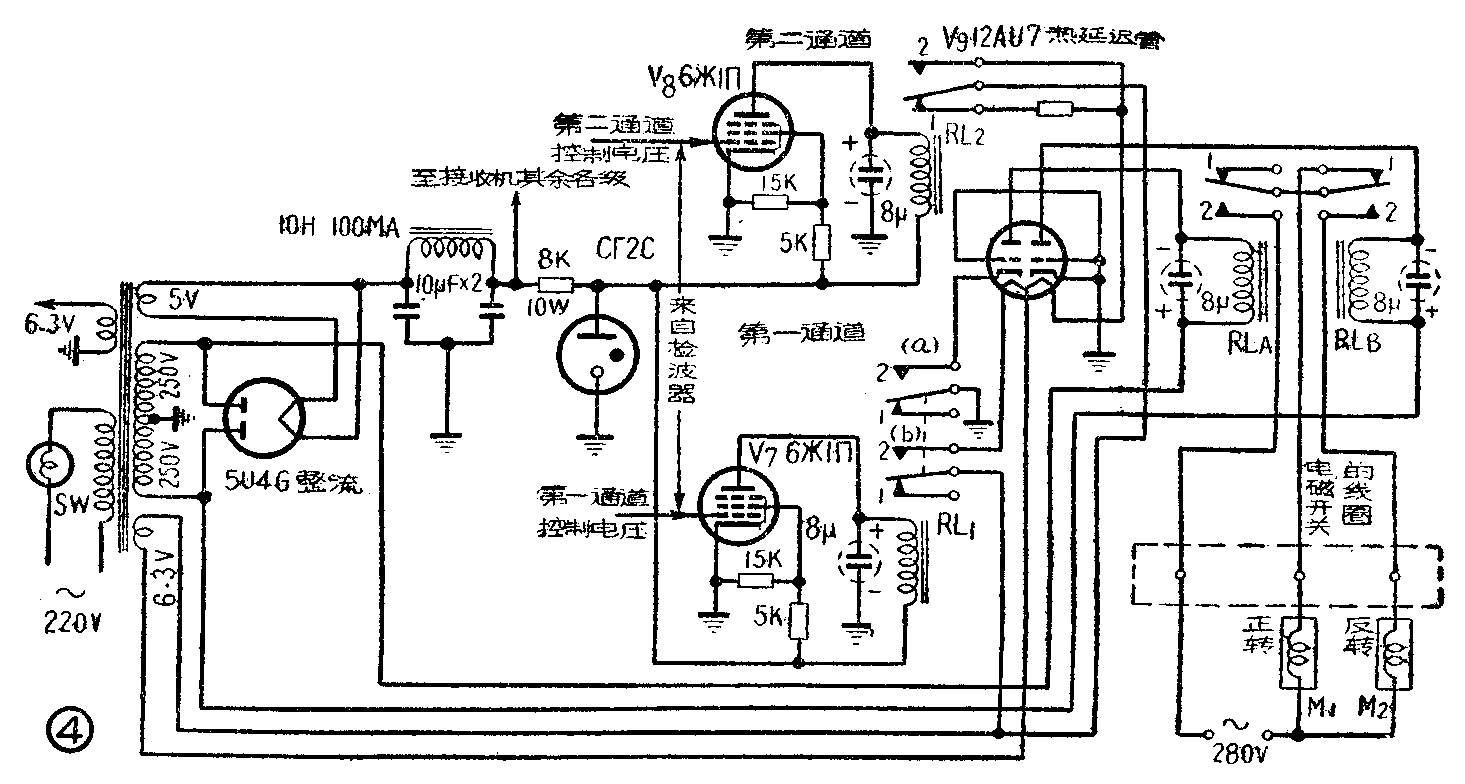
图4为控制部分的电路图(包括接收设备的电源,其中5U4G是整流管,GΓ—2C是稳压管)。电子管V\(_{7}\)和V8(两只6Ж1Π)为控制管,V\(_{9}\)是12AU7热延迟管。V9左边一个三极管的灯丝电压受继电器RL\(_{1}\)的控制,右边一个灯丝电压受继电器RL2的控制。V\(_{9}\)的两个屏极直接由电源变压器的次级供给交流电压,在两屏极上分别串接继电器RLA和RL\(_{B}\)。RLA控制280伏交流电源的开闭,RL\(_{B}\)控制电动机的正反转。
控制管V\(_{7}\)、热延迟管V9左边一个三极管,以及继电器RL\(_{1}\)和RLA为第一通道;控制管V\(_{8}\)、热延迟管V9右边一个三极管以及继电器RL\(_{2}\)和RLB为第二通道。
控制部分的工作过程如下;
假如两个通道都没有收到控制信号(发射机停止工作或发射机控制另一个接收机工作时),控制管V\(_{7}\)与V8出现屏流,继电器RL\(_{1}\)与RL2的簧片都处在接点1,热延迟管左边一个三极管的灯丝电路是断开的,因此不工作(没有屏流);右边一个三极管的灯丝电路虽没有断开,但由于串接了一个10欧的电阻,降低了灯丝电压,阴极达不到工作温度,因此也不能工作。这时继电器RL\(_{A}\)与RLB的簧片均吸到1,电动机的电源电路是断开的,因此不工作。
假如只有第一通道收到控制信号(相当于发射机对该接收机发射等幅高频信号),则由于在控制管V\(_{7}\)的栅极上加有负电压,因而使它的屏流截止。继电器RL1的簧片吸到2,接通V\(_{9}\)左边一个三极管的灯丝和阴极,使之出现屏流。这样就使RLA的簧片也吸到2,接通电动机的280伏交流电源。但由于第二通道的工作状态不变,继电器RL\(_{B}\)的簧片仍接在1,因此电动机正转,使犁前进。
假如两个通道都收到控制信号(相当于发射机对该接收机发射调幅高频信号),则第一通道的工作状态和接收等幅高频信号时相同,第二通道的控制管V\(_{8}\),由于有负电压输入,屏流截止。继电器RL2的簧片吸到2,V\(_{9}\)右边一个三极管的灯丝电路接通,继电器RLB的簧吸到2,这时电动机反转,进行移行。
在实际运用中必须解决下述两个问题。
第一是必须使继电器RL\(_{A}\)与RLB的动作协调。即当要求电动机反转时,应想使RLB簧片先接触2,RL\(_{A}\)后接触2;当要求电动机停止时,RLA簧片先断2,RL\(_{B}\)后断2。二者必须按上述程序进行,否则由于继电器RLB只有正转与反转两个开关,容易引起电动机的混乱动作。为此就要求RL\(_{A}\)慢吸快开,RLB快吸慢开。
第二是必须防止干扰信号对控制管的作用。电动机的电磁开关在合上或断开的瞬间要产生很大的火花,其频谱极广,而且由于电动机距接收机很近,干扰信号很强,即使接收机屏蔽很完善也能从天线本身传入,高频与中频电路是无法滤去的。另外在现场附近开动的汽车和拖拉机或其他电器、电力机械等,对接收机也有类似的干扰情况。
为解决以上两个问题,可采用热延迟法。V\(_{9}\)是6.3V/12.6V灯丝I电压的双三极管接成双二极管使用。前面已经指出,当接收机没有收到任何信号时,V9右边一个三极管的阴极温度比左边的高,但没有达到工作温度。当接收机收到使电动机反转的指令时,V\(_{9}\)的两组灯丝一起接通。由于右边的灯线已经预热,其阴极达到正常温度所需要的时间自然比左边要短,于是RLB达到快吸的目的。接收机收到停机指令时,V\(_{9}\)左边三极管的灯丝完全与电源断开,右边的灯丝仍然经过10欧的电阻而加热,自然左边阴极冷却的时间比右边的短,使RLA达到快开的目的。这就解决了第一个问题。
一般火花干扰的时间都很短,若进入控制管V\(_{7}\)、V8后再控制V\(_{8}\)的灯丝,由于灯丝预热的时间较长,以上的瞬间干扰早已经过去了,这也就解决了第二个问题。
这套设备虽然是供控制电犁用的,实际上它也适合用在速度低而马力大的其他农业机械以及交通运输上等等。(王懋诩)