通信
在海洋中航行的船只,要想和其他船只或陆地上进行通信联系,假如没有无线电设备,是非常困难的。因此,波波夫发明“无线电”以后,首先就应用在船舶通信方面。现在,百吨以上的船只都装有各种无线电机,在地球的任何地方,都可以和海岸电台或其他船只通报通话、收听气象资料和遇险报警信号等。船舶无线电通信设备的原理和陆用的差不多,但因船舶的行踪不定,振动很大,所以常采用一种长、中、短波俱全的复式设备,以便随时更换波长,保证通信。而且通信设备的结构特别坚固,以免发生故障。
求救
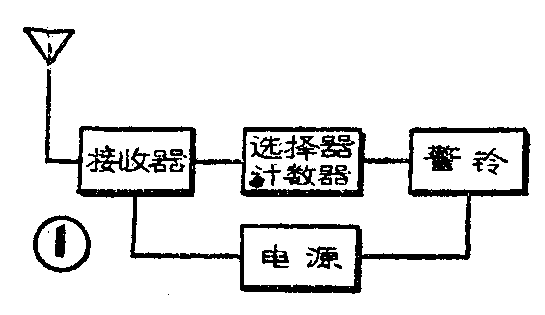
500千赫被世界公认为海上救命用的专用频率。船只遇险时,立刻用这一频率发出求救信号,以便附近船只赶来营救。海岸上及所有船舶上的电台时时刻刻都在守听着这个频率。每个船上都装有接收求救信号的自动报警器(见封二图1)。遇险船只连续发出持续时间为4秒、间隔为1秒的500千赫高频信号,在发出三个到四个这样的信号时,其他船只的自动报警器就会自动响起警铃。自动报警器由接收器、选择器、计数器、电源及警铃组成(图1)。接收器要求能均匀地接收492~508千赫内的信号。接收到的信号通过选择器,由计数器计数。如果接收来的信号的持续时间与间隔合乎规定(按照新的规定,求救信号的持续期可在3.5~6秒范围内变动,间隔期可在0.01~1.5秒范围内变动),那么经过三四个周期就能响起警铃。如果是其他信号(例如一般电报信号和杂音等),则选择器起到阻碍作用,不能使警铃动作。
遇险船只求救信号的拍发是自动的。一般是用等速或同步电动机经减速齿输带动一个刻有槽的凸输,使簧片接点周期性地闭合(四秒)和断开(一秒)。簧片接点接在500千赫发信机电键电路内,这样就能发出合乎规定的高频求救信号。新式的自动信号拍发器除了能拍发上述信号外,还能自动拍发“SOS”求救信号、本船的代号、遇难地点的经纬度、以及供其它船只测向用的测向信号等。
在船舶的每一只救生艇上,也都备有收发信机,以保证艇上与外界进行通信联系。由于电源的限制(通常用手摇发电机供给),输出功率一般不超过10瓦。要提高通信效率,天线的高度是关键问题。救生艇悬挂天线的方法,在海上无风时,用预先压缩储备的氢气或临时用氢化钾与海水混合后的氢气注入气球内,把100米长的结实的细天线升起来;在海上有风时,则用特制的风筝把天线升起。(参阅封二图2)。
对时
船舶在海洋中航行,要时刻注意船的位置是否在预定的航线上。这就要利用天文的方法观察星球的高度来计算得到。为了进行这个工作,船上就要配备一个精确的天文钟。但是天文钟不可能绝对没有误差,而误差会使求得的船位不准,因此要用无线电接收机接收专门发播标准时间的电台,每天把天文钟校对几次。
测向和定位
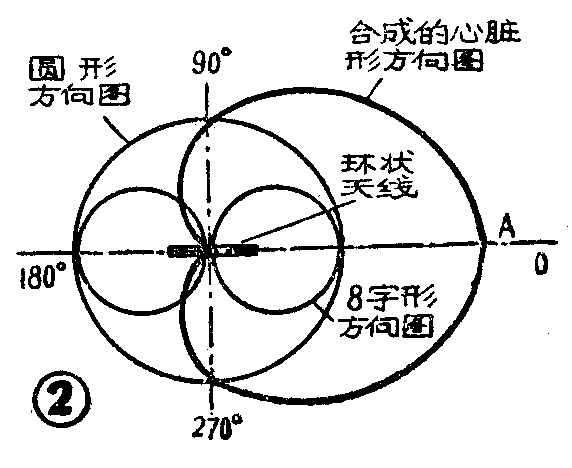
在阴天或有雾的日子,无法利用观察星球的方法来计算船位。自从船上有了无线电测向仪,就解决了这个问题。测向仪可用来测定船只和已知固定发射台(示标台)之间的相对方位。它的基本结构是一架高灵敏度、窄通频带的中频接收机,在输入端接一付环形天线,利用环形天线的8字形方向性来确定方向。当环形天线平面和所测示标台的方向成垂直时,输入到接收机的信号最小,因而在耳机中听到“哑点”(无声)。环形天线的转轴上刻有度数,所以测得“哑点”就能指出所测示标台的相对方位。但是环形天线每转一周可得到两次“哑点”,彼此正好相差180°,因此,为了确定哪一个“哑点”表示示标台的真实方向,还需要加用一个无方向性的垂直天线。垂直天线的方向图为圆形的,它和环形天线的8字形方向图合成为心脏形方向图(见图2)。图中A点为天线的最大接收方向,将A点对准示标台,在耳机中将听到最大的声音,从而可以得到单向接收。新式的测向仪已经采用了固定的双环天线、自动测角器和示波管来提高测向的速度和灵敏度。接收机收到欲测示标台的信号,在荧光屏上就立刻显示出与示标台方位一致的直线或螺旋桨图形,从而可以在荧光屏旁的刻度上读出方位来。这种仪器的作用距离一般为一二百里(一里合1852米),是一种近海助航仪器。
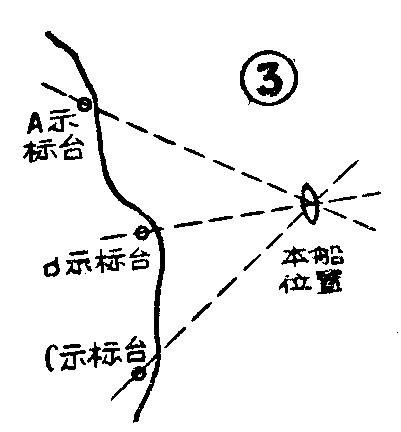
示标台一般由三个台编成一组,每台都有自己的呼号,使用相同的频率。三个台依次循环地发出示标信号,所以船舶能很快地测得三个台对船舶的方位。在已注有示标台位置的海图上划三条方位线交于一点,就可以决定船舶的位置(参看图3和封二中的图3)。
也可以在岸上的适当地点安装若干个无线电测向仪,而从船上发出测向信号。从岸上测得船舶的方位后,再用无线电话或电报通知船舶。
远航仪
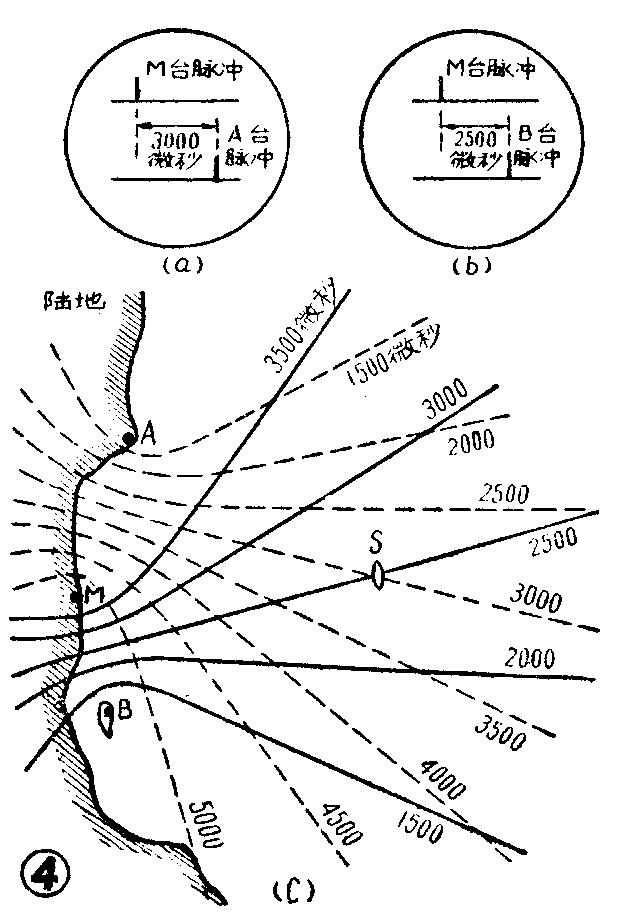
远航仪(又称罗伦)是以一架高灵敏度接收机为基础而用示波管进行显示的仪器。它装在船上,用来测定本船的位置。这种仪器的作用距离在白天约为650里,夜间可加倍,比测向仪的助航范围大得多。它的工作原理如下。在海岸上有几对相距约600里的电台(图4c中M、A为一对,M、B又为一对)。每对中一为主台(M),一为辅台(A或B)。主台先发出脉冲电波(频率在1700~2000千赫之间),同时去激发辅台, 经过一定的时间延迟, 辅台再发出脉冲电波。船上的接收机接到先后到达的两个脉冲,并在示波器上显示出来。例如,对于M、A两台的信号,所显示的脉冲如图4a所示。M台脉冲和A台脉冲的时差,可由计时器来测定,直接读出。这个时差即代表船舶距主辅两台的距离差。因此,接收主台(M)和辅台(A)信号时得到相等时差的地点,它们到M点和A点的距离差也相等,所以这些地点是处在以M、A两点为焦点的双曲线上。不同的时差对应着不同的双曲线,这样就构成了如图4c中的虚线所示的双曲线族。同样道理,对于M、B两台,也有一组以M、B两点为焦点的等时差双曲线族,如图4c中的实线所示。这些双曲线族,是在特制的海图上事先绘好的。实际应用时,举例说,根据实际显示的M、A两台的时差3000微秒(图4a),和M、B两点的时差2500微秒(图4b),就可以在海图上找出两个相应等时差线的交点S,这一点就是船只所在的位置。
雷达
雷达是一种航海安全设备。船上有了雷达,不论是白天黑夜、下雨落雾,都能在荧光屏上看到本船周围的一切障碍物图形(如其他的船舶、浮标、海岸、冰山等),从而使驾驶员能预先采取相应的避让措施。用海图与雷达图形进行比较,还可以定出本船在海图上的位置(参看封二图5)。
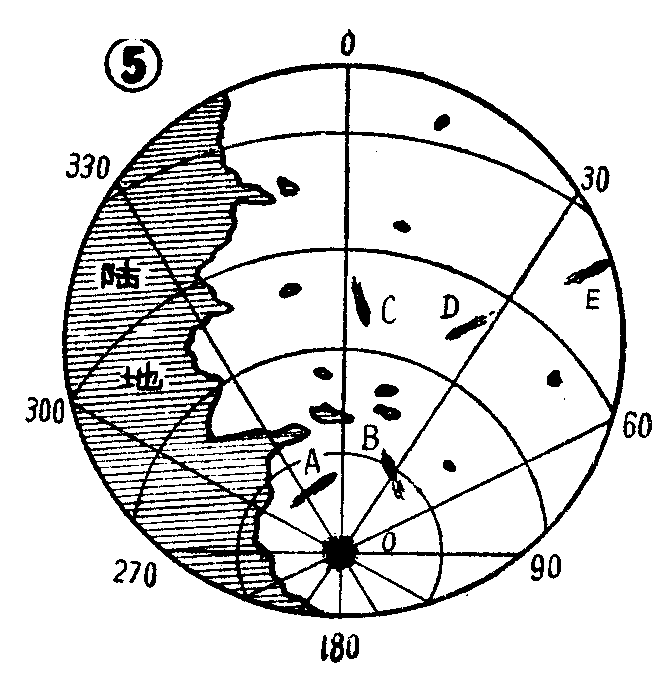
雷达设备由发射器、接收器、示波器和抛物线形旋转天线(参看封二图6)组成。它发出宽度以微秒计的微波脉冲(一般是每秒500~1000次、每次持续时间为0.1~1微秒的9000兆赫左右的脉冲信号),再接收从四周目标反射回来的回波,加以放大检波后,在示波器上直接显示出船只四周几十里内的景物来。在新式的雷达中附有电子计算机,再配合上电航速仪等设备后,就可以在示波管上看出或算出活动船只的航速、航向来,因而可以分辨出何者是固定目标(如岛屿、灯塔),何者是航行船舶,避免碰撞事故。图5为雷达显示图的一个例子,图中O为本船,可以通过调节来改变它在荧光屏上的位置,A、B、C、D、E为移动目标,有尾部余辉,其余小黑点是固定目标。
测深仪
超声波仪器也常常在航海中应用。例如,回声测深仪就是其中的一种(参看封二图7)。它可以在船舶航行中随时测量船底到河底的距离,从而得到航线上的水底图形。驾驶员常常利用测得的水深与已标明水深的海图比较,来确定船舶的大致位置。
回声测深仪利用超声波遇到障碍物能够反射的原理,它是由发射器、放大器、指示器和换能器构成的。发射器产生的超声频电振荡脉冲送入船底装的换能器,转换为超声波脉冲,集束地向海底传播,遇海底而反射。反射回来的超声波又被船底的换能器接收,转换成超声频电脉冲信号,经放大器放大后,加到指示器或记录器上。指示器把发出的信号脉冲与回波脉冲间的时间差加以比较,就能够立刻显示出深度来。也可以用记录器在移动的纸条上自动记出航行路线上的水底深度图。一般测深仪的频率为几十千赫,最大可测的水深可达3000~4000米。
以上简单介绍了无线电电子设备在航海中应用的几个例子。实际上,它的应用决不止这些。随着无线电电子学的飞跃发展,航海用电子仪器正向着更方便、更迅速、更准确的方向迅速前进。(杜兆葛平)