遥控和模型的遥控
随着科学技术的进步,无线电遥控技术的应用愈来愈广泛了。一些现代化的运输工具,例如火箭、人造卫星、宇宙飞船等等,都是依靠无线电设备来进行遥远控制的。现代化的遥控设备,一般要包括“遥测”、“遥控”、“自动控制”三个部分,它们组成一个“制导”系统,来控制、引导无人驾驶的运输工具的航行。让我们举一个控制导弹的例子来说明吧!
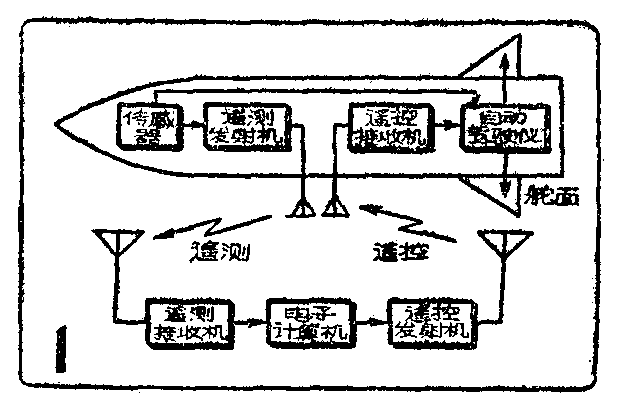
导弹是用来运送飞弹击中敌人的目标的,当导弹发射出去以后,我们要对它的航行路线不断地加以控制和修正。这首先就要了解正在飞行中的导弹的各种参数,例如航向、速度及飞行姿态等。如图1,装在导弹内的传感器测得导弹的各种飞行参数后,通过遥测发射机编成一定的无线电信号发回地面的遥测接收机;或者是用雷达去探测这些飞行参数和导弹座标,这就是“遥测”。遥测设备测得这些参数后,通过电子计算机加以综合、分析,计算出应该怎样操纵的结论。然后编出相应的无线电指令信号由遥控发射机发向导弹遥控接收机,再通过自动驾驶仪来控制或修正导弹的航行轨迹,这就是“遥控”。导弹在飞行中,外来因素(如风力、敌情等)是很复杂的,只靠地面操纵还不够机动,所以导弹本身还装置着陀螺仪和自动调节器等自动驾驶设备,以稳定、控制自己的飞行轨迹和参数,这就是“自动控制”。
由此可见,现代化的遥控系统是非常复杂而庞大的,涉及的问题是雷达、电子计算机、自动驾驶仪和多路通信的收发信设备等等。对于我们无线电或模型爱好者来说,无论就技术力量或财力、物力方面都不可能装置这样复杂的设备。我们的研究和制作的,只是简化的、降低了某些指标的——模型规格的遥控设备。目前所研究成功的模型遥控设备还没有“遥测”和“自动控制”部分,只是“遥控”,就是由地面上的遥控发射机发出指令信号,通过模型仓内的遥控接收机来控制模型的动作。这种设备虽然比起现代化的遥控设备来要简陋得多,但是遥控的基本原理是相同的。我们在研究模型遥控设备的基础上,进一步提高,将来也未尝不能够研究遥控火箭、人造卫星以至宇宙飞船等等。
模型遥控设备的工作原理
为了便于说明问题,举一个最简单的单通道无线电遥控设备作为例子。图2就是这种设备的方块图,它分成两大部分:安置在地面的发送设备和安装在模型内部的接收设备。这和无线电广播电台和收音机之间的关系十分相似。不过无线电广播是利用电磁波来传递声音,而无线电遥控则是利用它来传递机械动作。
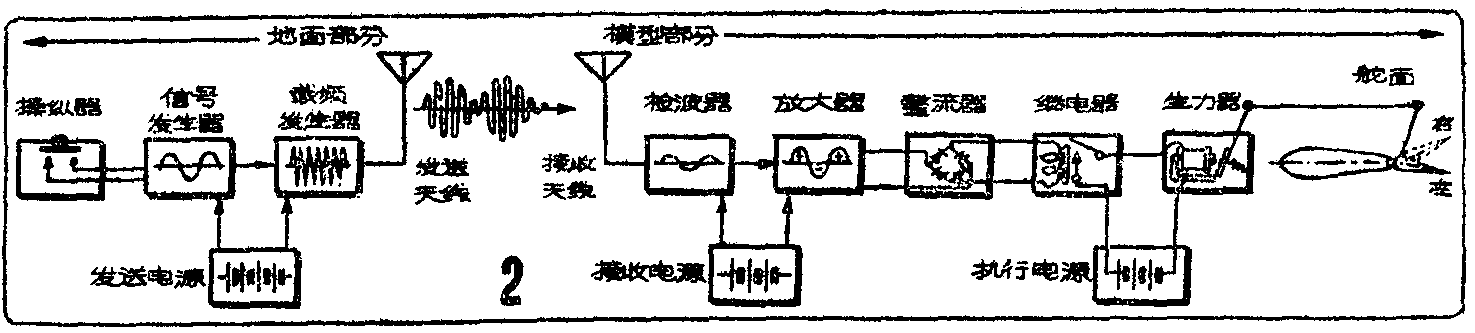
当操纵器按钮还未按下时,收、发双方都处于原始状态。模型舵面也静止在某一固定位置,例如我们可以预先把舵面调整到略微偏左(图2实线位置),也就是说模型在无操纵的自由航行时是左转的。
当按下操纵器按钮时,将信号发生器电路接通,产生一个音频信号(代表某种指令),送到载频发生器去调制载频,使本来是等幅振荡的无线电波变在幅度按照音频信号变化的调幅波,送到发射天线辐射出去。
模型上的接收机是调谐在同一载波频率上的。天线接收到上述的调幅波,由检波器检出音频,使代表人们意志的信号在接收端再现。可是经过长途跋涉的信号是非常微弱的,必须由放大器进行放大。经过放大后的信号已具有足够的能量。假如是用无线电传递语言和音乐,那么在这里就应该接上一个耳机或扬声器,使信号电能变为声能;而我们的目的是用无线电信号传递机械动作,因此在相当于耳机的位置,接上了一个遥控设备中十分重要的元件——“继电器”,就是这个元件第一次将电信号转换为机械动作。
继电器是由一个灵敏电磁铁和一组接点开关组成的。当有微弱的电流输入电磁铁线圈时,电磁铁就产生吸力,吸动衔铁,使接点闭合。但这里所用的继电器是直流继电器,所需的工作电流是直流电,而前级的音频信号却是放大了的交流电,因此还必须通过整流器把放大了的交流电变成单向直流电,才能使继电器动作。
继电器虽然把接收到的信号变成了机械动作,但是它的力量还是很微弱的,远远不能直接来推动舵面,它的作用只是使接点闭合,接通下面的电路。一个称之为“生力器”的电磁铁,和一组执行机构电源串联在继电器接点开关的回路里,当继电器接点闭合时,生力器电磁铁由执行电源取得电能而吸进。这个电磁铁比继电器的灵敏电磁铁要强有力得多,因此可以通过杠杆机构将这个机械动作传递到舵面上去,带动舵面动作。如图所示,当操纵器按钮按下后,舵面就由原来的左偏位置转到右偏位置(图2虚线位置)。这样,操纵器就通过无线电信号间接地操纵了舵面。而模型也就得到两种不同的航行姿态:不按操纵器,左航;按下操纵器,右航。
这种系统只有一种信号,只需要一个“通道”就够了,所以叫作“单通道无线电操纵设备”。
“多通道”和“独立通道”
只能操纵模型做一种动作,那未免太简单了。拿模型飞机来说,它的方向舵、升降舵、副翼、发动机的油门等等,都是需要操纵的。因此就需要有多种信号,分别操纵模型做各种动作,例如用250赫信号命令飞机右转,用375赫信号命令飞机上升等等。这些信号要分别经过各自传送途径送到执行机构,因此需要许多通道才行。这就是通常所说的“多通道”遥控设备。目前模型遥控常用的是一种“机械谐振式”的多通道设备,它的原理如图3。

在这种设备中应用了一个叫做“谐振继电器”的零件来选择通道。它的构造和耳机相似,只不过用一组长短依次排列的钢质簧片代替耳机的振动模作为振动元件,每个簧片各具有一个固定的谐振频率。发送端可选择某个频率使接收端谐振继电器上相应的簧片谐振,簧片上的接点就接通了这个通道。因此有几个簧片就有几个通道。继电器簧片最多可到12片,可以有12个通道,而且体积小、重量轻,所以目前在遥控模型设备中应用这种方式的比较多。
实现了多通道,能够操纵模型上不同的舵面了,但是几个船面能否同时进行操纵呢?也就是说,几个信号能否同时发出,到达接收端后能否把这些信号分开而互不相混呢?这就是通道能否“独立”的问题。像以上所述的机械谐振式遥控模型设备,一般的说,谐振继电器的簧片在同一时间内只能有一片振动,即在同一时间内只能控制一个舵面,而其他舵面必须等待这个舵面工作结束后,然后抽空来进行操纵。因此它们的通道是“不独立”的。但是在某些较完善的线路里,也可以做到使谐振继电器有两个簧片同时工作,也就是同时通两路信号。它是先将两个音频信号混合起来,如图4,a,b分别为250赫和375赫的两个音频信号,混合后的信号如图C,然后调制到载频上发射出去。在这个合成信号里,包含有原有信号频率和新产生的差拍频率。在接收端,谐振继电器就可能有两枚簧片同时振动,每一簧片分别只感受合成信号中的某一音频分量而振动。假如谐振继电器是8个簧片,把它们分成两组,如果能够在第一组的一、二、三、四通道内任选一道和第二组的五、六、七、八通道内任选一道同时操纵,这种设备就叫做“两路八道”。但由于合成波产生了新的频率,而且发射机的多信号调制,要降低信号的调制深度,因此这种程式的设备能通的路数就受到限制,最多不能超过两路。比较完善的实现多路(独立通道)的办法是采用“频分制”或“时分制”,它们的原理分别和载波多路电话和脉冲调制多路电话相似,构造比较复杂,这里就不介绍了。
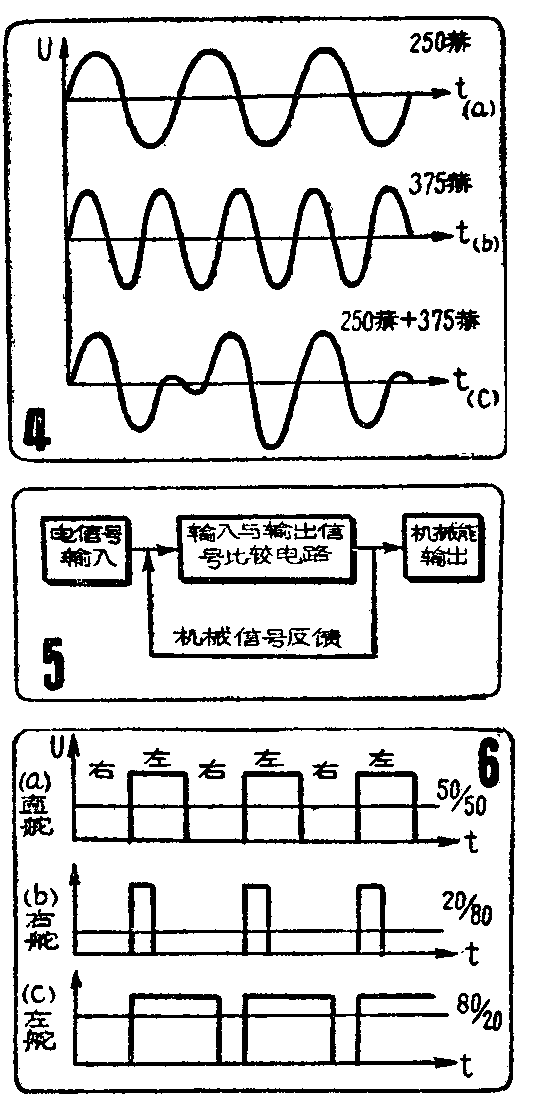
连续的通道
前面说过,操纵器发出信号,能够控制舵面偏转,但偏转量的大小如何控制呢?能否做到真的好像把飞机或船只机舱内的驾驶系统搬到地面来驾驶一样,发送端操纵杆偏转多少角度,舵机也就偏转多少角度呢?这就是所谓通道的“连续”问题。要做到这样,信号就要是连续变化的,例如在一个频带内变化,以变化的大小来代表操纵量的大小,而接收端就要采用输出与输入信号相比较而自动平衡的电子装置(如图5),使舵面偏转大小与信号相对应。这种设备是相当复杂的。一般爱好者所采用的是“半连续”的办法,输入的还不是连续的信号,而是将两个不连续的信号(例如使舵面左偏或右偏)周期性地交替发送,使舵机不停地向两个方向往复偏转摆动,利用往复时间的比例,确定舵机的平均位置。它的原理如图6。采用的是矩形脉冲信号,脉冲到来时舵机左偏,脉冲间隙时,舵机右偏。在图6a中,脉冲时间和间隙时间相等,因而舵机左偏和右偏的时间相等,平均起来舵机是“直舵”位置。图6b中,脉冲时间和脉冲间隙时间之比为20/80,舵机右偏的时间多,左偏的时间少,平均起来就是“右舵”。图6c是左偏的时间多,右偏的时间少,平均起来,就是“左舵”。这样利用脉冲波的脉冲时间和脉冲间隙不同的比例,就可以决定舵机偏转的方向和偏转的大小了。(陶考德)