以今天飞机的高速度,达到的高度和愈来愈频繁的空中交通情况,导引飞机在复杂的气候条件下,按航线飞行安全降落,以及执行各种空中任务(例如战斗飞行或各种专业飞行)等,都要靠各种无线电电子学导航仪器和计算设备来完成。
这里简单介绍一些无线电电子学飞机导航设备的原理。
远距离导航设备
飞机全景雷达 利用这种雷达,飞机可以不断观察自己在航线上的飞行状态,以确定飞机的位置。用具有狭窄刀形辐射图形的旋转天线,在雷达的有效范围内不停地扫掠地面(图1),地面地物的反射信号显现在荧光屏上成为一幅轮廓地图,与地理地图对照可决定飞机的位置。
推测航行法仪器 用“推测航行”法可以决定每一瞬间飞机在空中的准确位置,但必需知道飞机的对地速度、飞行方向线与正北方向线所成的角度。经过计算得到速度沿两个座标轴的分量以后,就能决定飞机在这个座标系统的位置。用最近设计的多普勒对地速度测定仪可以测定飞行中的飞机的真实速度。
无线电六分仪 无线电六分仪是一种接收太阳辐射的电磁波而自动跟踪太阳的仪器。这种六分仪能在任何气候条件下和一般的光学六分仪一样测定飞机的位置。
以上这些飞机的自备航行仪器,优点是不受距离的限制,能在整个航线上保证飞机的导航。缺点是在飞行中会产生相当大的误差,这是不能满足现代航空的要求的。此外一切的推测航行法仪器都是与陀螺仪和磁性罗盘紧密联系的,但这些仪器在高纬度地区(如南、北极地)是不能适用的;陀螺仪罗盘在飞行中也会产生误差。因此必需有一种仪器能不断修正这些误差,这就是一些复杂的地面无线电远程导航设备。
地面导航设备
双曲线导航设备 双曲线导航设备分三种:脉冲式、相位式、相位脉冲式。它们的区别是:有的测量地面几个发射台发出脉冲到达的时差,有的测量两个地面发射台的信号相位差。
其中相位式双曲线导航设备的原理是:两个地面发射台所发电波相位相等各点的轨迹构成一根双曲线,利用两根这样的双曲线的交点可决定飞机的位置(如图2)。一般用三部或四部发射机同时发射确准同步的等辐波,其中一部发射同步信号称为“主台”,其他为“副台”。每一对发射台构成一个以两电台为公共焦点的许多同相位的“双曲线族”。飞机接收地面的信号。在一个类似汽车路码表的指示器上指出某一根双曲线的号码。飞行员或领航员按指示的数字,在一个特别的印有双曲线族的飞行地图上,找出某两根双曲线的交点,这就是飞机在这一瞬间的位置。
其他型式的双曲线导航设备工作原理,大抵与以上型式类似。
方位距离导航设备 这种设备可同时测量飞机的位置方位和离地面导航台的距离。
地面电台的三付天线各置于一个等边三角形的顶点,每秒钟连续发射四个脉冲,前三个脉冲依次用两付天线同时发射,每一对天线发射时辐射图形成8字形,三个圆形的轴线互成60°的交角(图3)。飞机接收首三个脉冲并比较它们的辐度就能决定飞机的方位。第四个脉冲用三付天线同时发射,用以决定同步及决定距离。这种设备工作距离可达4000公里。
在现在的导航系统中还采用一种称为“自动领航员”的仪器,能在飞行中自动地用笔在地图上把飞行的路线画出来。
近距离导航设备
在1955年以前,近距离导航是用各种类型的无线电台,并配合如无线电罗盘、四航向及全方向无线电标识台等以导引飞机归航,其工作距离约为200—300公里。有时大的航空港区域还使用广播电台导引飞机归航。这些设备缺点很多,只有不计风速及漂移的条件下适用。
1955年出现一种新的近航用的超短波无线电方位距离测量仪器,能指示数架飞机对地面电台的方位和距离,并把这些数值直接在指针型仪表和计数表上表示出来。飞机向地面电台发出一种询问脉冲,由地面电台接收后再发射出去,飞机再接受反射的电波,测量脉冲一来一回所需的时间,就能决定飞机到地面电台的距离。
方位的测量系用一个有圆形辐射图形的固定天线,外罩两个以每秒15转旋转的圆筒,其上固定一个垂直的无源(不与发射机联接的)吸收系统。内层圆筒上有一个无源的反射体,将原来的圆形辐射图形改变成心形。当无源吸收元件、固定的辐射体与正北方向在一条直线上时,就发射一个给飞机接收机作计算基准用的基准信号。在心形辐射图形的最小点指向飞机时,根据“空中振幅调制”原理,飞机收到的信号将为15周的调制信号。若能测定正北基准信号与飞机接收的调制信号的最大值的时间间隔,就能求得与这个时间间隔成正比的飞机方位角。用这种方法测定方位误差很大,刻度盘上只是粗略的方位刻度。因此在刻度盘上需再加上精细刻度。这是在原来幅射图形上再加上多片花瓣形圆形。实际的做法是围绕内层圆筒再加上一个同步旋转的外筒,上有若干吸收元件,使幅射图形变成图4.Б.所示的形状。这样可将精确度增高到1°,距离测量的精确度达200公尺。
导引飞机降落着陆的系统
远距离搜索雷达 在飞机的无线电设备中,远距离搜索雷达是一种准确掌握飞行情况、控制空中交通、保证飞行降落的设备。用这种雷达确定飞机的方位和距离。此外利用特殊的询答器,在飞机接收机接收到地面雷达射出的连续脉冲时,将高度译成相应的电码再发向地面,使地面能随时掌握飞机的高度,这样可使飞机间保持一定的安全飞行的距离,并增加雷达的工作距离和避免附近地物的影响。
仪器控制盲目降落 这种制度系采用称为“着落方位标识”及“滑翔路径标识”的基本仪器,分别发射两组波束,以控制飞机上的“着陆姿势表”上的两根交叉的指针,由指针的偏离中线与否指示飞机着陆方位和滑翔角是否正确。着陆方位标识的波束在垂直位置上确定一个着陆方位平面,滑翔路径标识在水平位置上确定一个滑翔平面(如图5),这两个平面的交线,就是飞机的正确降落线。
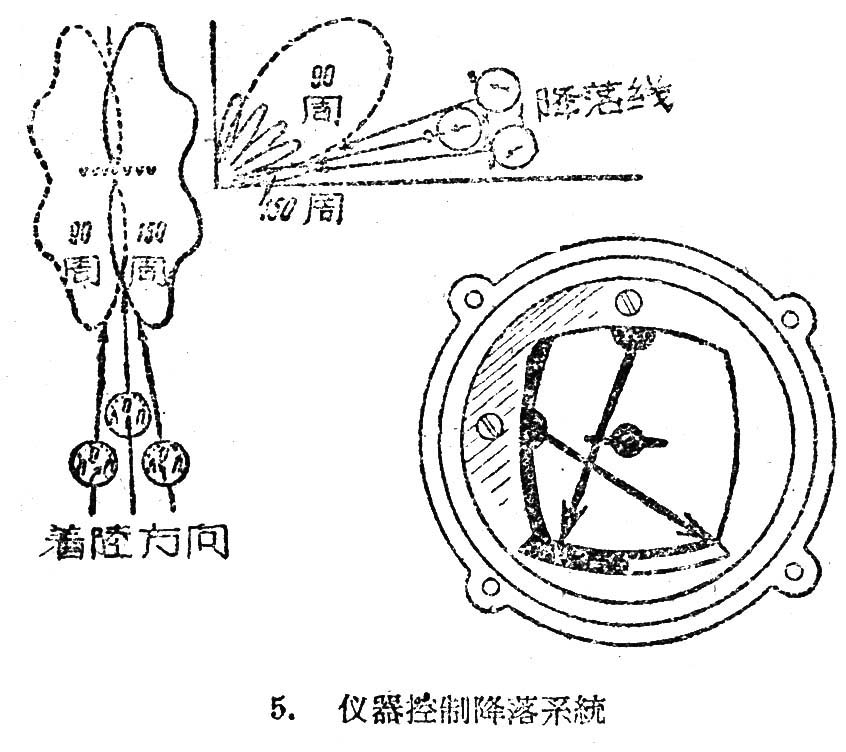
当飞机准确地沿指定的着陆方位与滑翔路径降落,也就是飞机所接收的偏左偏右或偏上偏下的90周及150周的调制信号幅度恰相等时,它的着陆姿势表的两根指针正指中线。当飞机偏离正确的降落线时,所接收的90周及150周调制信号幅度就不相等,从而指针也就偏离中线,表示驾驶员应该立即纠正飞机航向和高低。在降落时驾驶员的工作只是操纵飞机保持着陆姿势表两根指针交点一直处于中心的小圆圈内。
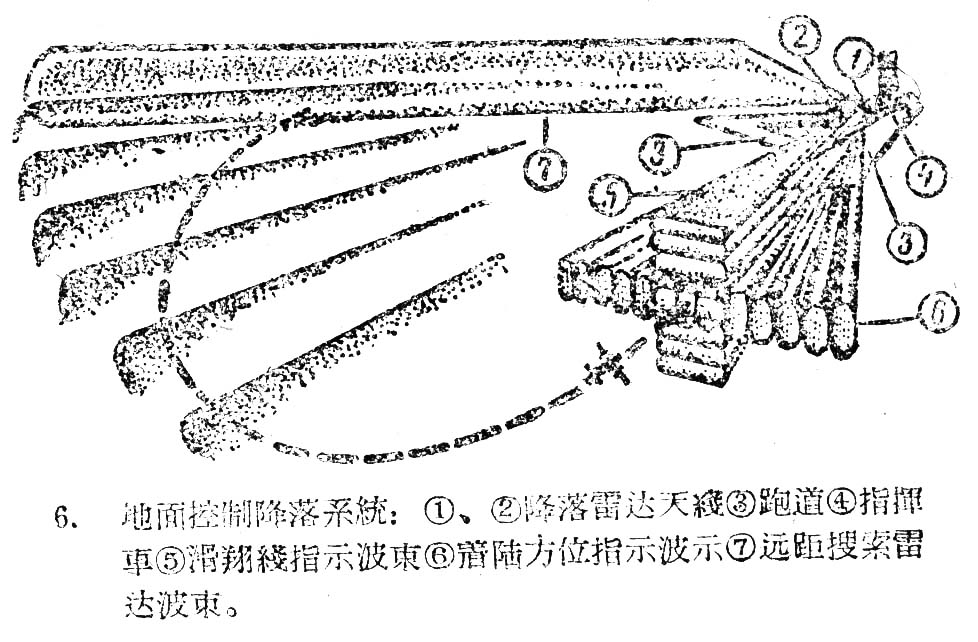
地面指挥降落 这种降落方法一般系用两部雷达,在荧光屏上不断观测飞机飞行情况,以无线电话指挥驾驶员操纵飞机采用正确姿势着陆。一部雷达搜索飞机并引导飞机降落,另一部精确地确定飞机位置座标,使飞行指挥员在飞机偏离正确降落线时对驾驶员下达修正的命令。
降落雷达有两付天线,其中一付观测飞机在垂直平面上的滑翔路径,一付供观测水平面上飞机的着陆方位。用二者配合以观测正确的降落线。它的优点是设备简单可适用于任何型式的飞机。缺点是因在决定情况时容易发生主现的误差和动作上的延迟,降低降落的安全程度。因此近年来又出现自动的地面控制降落系统。这对近代的高速喷气飞机是特别有意义的。这种方法是在地面和飞机上加装相位指示表(阴极射线管型的)。飞机收到控制信号后加到自动驾驶仪上,由驾驶仪操纵飞机着陆直到能清楚地看到地面(约15—20公尺),以后再由驾驶员操纵。
一般的盲目降落设备最小工作范围是受云高和水平能见度的限制的,大约云不能低于50公尺水平能见度不小于500公尺。然而用近代的能判别很小高度数字的无线电高度表(例如可谈出20—50公分的高度),和其他设备配合,可解决在任何气侯条件下降落的问题。
空中交通自动控制系统及自功引导飞机降落的系统。
在近代繁复的空中交通及高速的喷气式歼击机及轰炸机群的起飞降落工作中,有时在极复杂的气候条件下,要保证每小时有100—120架飞机的降落,就需要有自动化的飞机降落导引系统。
这种系统由标准的环视雷达、自动跟踪的测距测向电子仪器和自动化的通信设备组成。机场用雷达观测飞机飞行情况,掌握飞行的速度高度并自动密跟踪飞机,用计算设备迅速算出在降落线开始点的速度及高度。然后用记忆装置安排飞机的降落次序和时间。
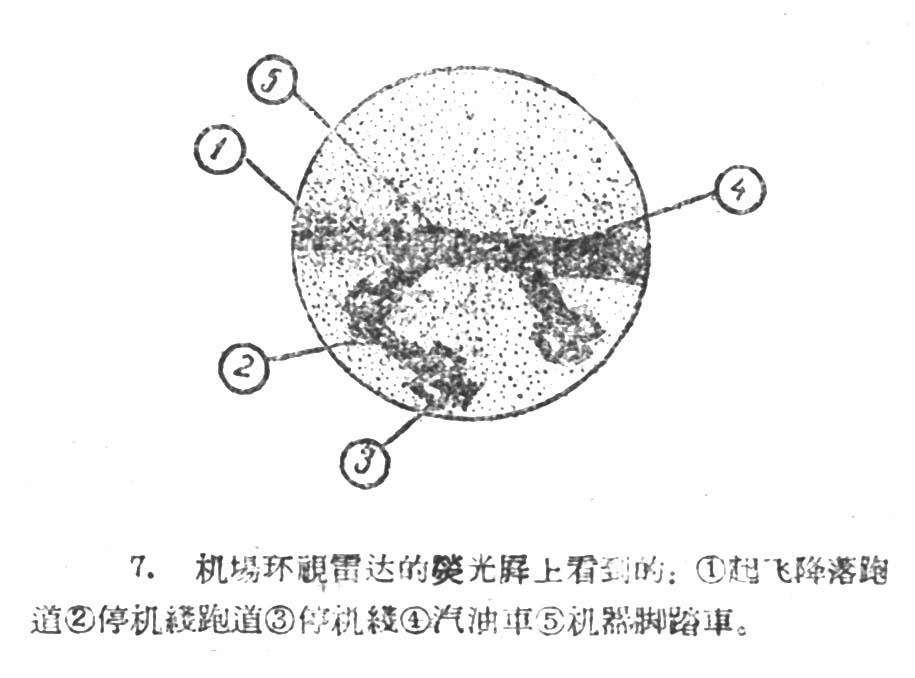
机场环视雷达 为避免飞机场内起飞降落滑走的飞机或停机线上移功的飞机的互相碰撞,机场上可用“环视雷达”。使机场人员能在荧光屏上清楚地看到机场飞行区域平面内的地面情况,了解跑道、停机线上的飞机、汽车等的移动情况。这种雷达一般要用较高的(如波长8公厘)工作频率。(本刊根据苏联无线电”杂志材料编译)